







Dne 17. dubna 1969 se odpoutává od nosného letounu NB-52 netradiční kluzák. Na jeho palubě se nachází pilot Jerauld R. Gentry, který povede svůj stroj k přistání na dně vyschlého jezera u Edwardsovy letecké základny. Na jiných základnách by kluzák X-24A mohl působit jako z říše sci-fi, ale na Edwardsově základně už byli zvyklí na ledacos. Přece jen to byl domov i Test Pilot School pod velením slavného Chucka Yeagera a na základně se stále zkoušely nové stroje. Své letové zkoušky si zde odlétaly i letouny z kategorie vztlakových těles, ať už z dílny NASA nebo USAF. NASA i USAF navíc uzavřely společné memorandum o spolupráci v této oblasti a jejich vývojové snahy se postupně propojovaly. Prostřednictvím projektu X-24 nám také vrcholil celý program START (Spacecraft Technology and Advanced Reentry Tests), se kterým zde trávíme již nějaký čas.
X-24A 2/2
Zdroj: Martin X-24A Lifting Body
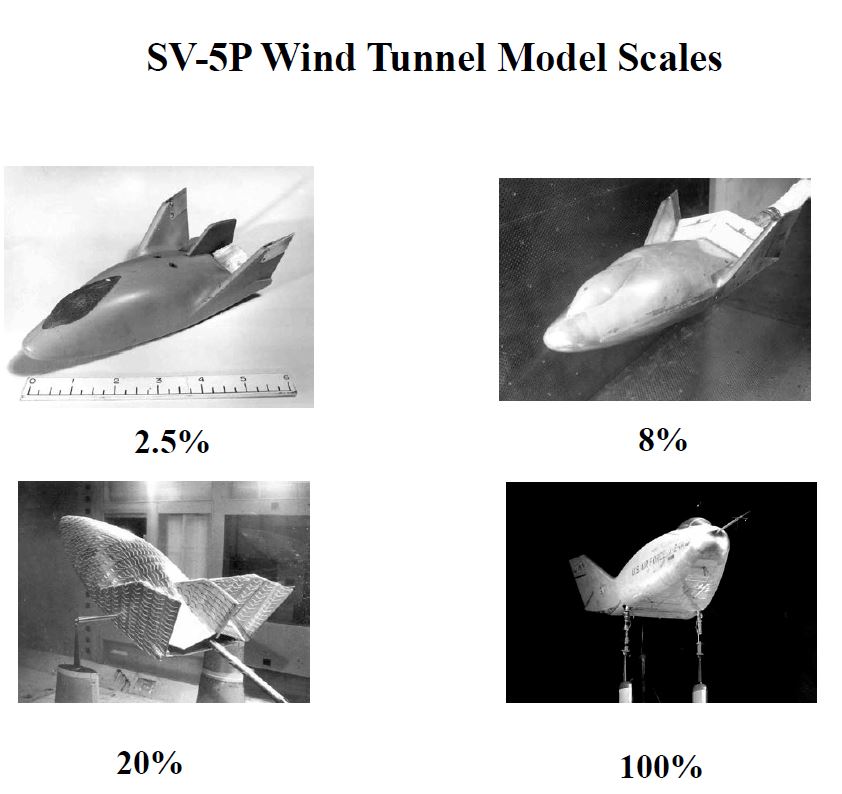
Hlavním tématem u vzniku X-23 a X-24 bylo hlavně aerodynamické uspořádání celého stroje. Jak jsme si již mnohokrát popsali v minulých dílech, ofukování v aerodynamických tunelech bylo alfou a omegou ve vývoji. Nejinak tomu bylo i po stavbě X-24A. Zmínil jsem dodatečné testy, které měly odhalit případné nečekané chování stroje během letu, jako tomu bylo u kluzáku NASA HL-10. To ovšem nebylo poslední testování v tunelu. Další důležitým bodem bylo testování letové konfigurace X-24A/NB-52, tedy kluzáku upevněného na pylonu nosného letounu NB-52. Tyto testy se prováděly už v projektu X-15 a pokračovaly i u projektů M2-F2, HL-10 z dílny NASA. Bylo to zcela logické, protože samotný nosný letoun mohl nepříznivě ovlivnit let X-24A a vhodnou volbou tvaru nosného adaptéru tomu šlo předejít. Samotná konfigurace letů pak byla podobná jako u X-15. První lety byly provedeny v bezmotorovém režimu a pak následovala už série motorických letů.

Zdroj: nationalmuseum.af.mil
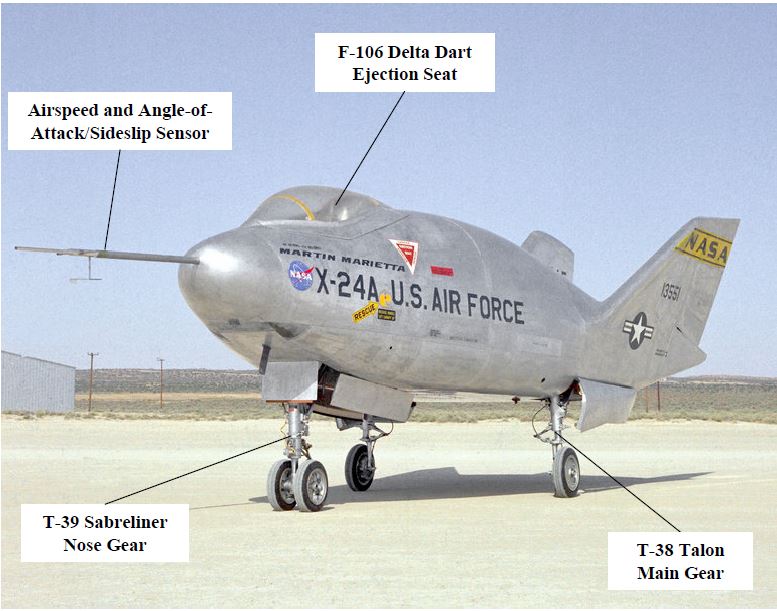
Dne 24. srpna 1967 byl kluzák X-24A dodán na leteckou základnu Edwards. Podle původní dohody mělo dojít k dodatečné instalaci všech systémů právě až po dodání na AFB Edwards. Pro X-24A byla zvolena osvědčená cesta využití již existujících leteckých celků z jiných typů letounů pro urychlení vývoje a konstrukce. Po dodání USAF však nedošlo ihned k zahájení letových zkoušek, jak by bylo očekáváno. První etapou byly zkoušky ve větrném tunelu, které byly prováděny v AMES a o kterých jsem již psal v minulém díle. Jen pro připomenutí dodám, že šlo o zkoušky se simulovaným ablativním povrchem a jeho vlivem na letové vlastnosti kluzáku. Kluzák se na AFB Edwards vrátil až 15. března 1968 a ihned na něm začaly práce s instalací všech systémů a následných zkoušek. Jako hlavní inženýr pro X-24A byl určen Norm DeMar, který vedl celou skupinu techniků. Po zahájení všech technických prací na kluzáku se však začal objevovat jeden problém vedle druhého. Prvním ze zásadních problémů byl přístrojový panel v kabině, který byl už od začátku navržen tak, že se nedal jednoduše demontovat, či vyklopit. Vyklopení, či snadná demontáž celé palubní desky usnadňovala přístup k přístrojům ukrytým za deskou. Kvůli tomu strávili technici celé dva měsíce instalací konektorů s pinováním vodičů a připojení pro hadice pitot-statického systému. Dalším nepříjemným problémem byl únik hydraulické kapaliny. Na únik kapaliny se přišlo během prvních testů celého systému a jako viník byly označeny servopohony, které musely být kompletně vyměněny. Problémů opravdu nebylo málo a při dalších testech řídicího systému došlo k odhalení strukturální odezvy na zaváděné oscilace do řídících ploch. Zjednodušeně řečeno, oscilace vyvolané na řídících plochách se přenesly na závěsy řízení. Tím, že závěsy byly uchyceny v zadní části, která byla méně dimenzována než přední část. Dalším tématem se stalo vyvážení. Konstruktéři společnosti Martin Marietta se chtěli vyhnout problémům s těžištěm a vyvážením, které museli řešit konstruktéři konkurenční společnosti Northtrop. Northtrop musel během stavby M2-F2, M2-F3 řešit přidávání dodatečné váhy do přední části. Tomu se chtěli u společnosti Martin vyhnout. Konstruktéři tvrdili, že jednou z předností tvaru X-24A bylo, že nabízel větší objem v přední části pro pilota, což umožnilo instalaci těžkého vybavení do přídě. Konstruktéři z Martina však byli s kontrolou hmotnosti tak šetrní, že konstrukce a pohony v zadní části X-24A měly minimální rozměry a tloušťku použitého materiálu, viz. oscilací do řízení. Ve skutečnosti byl zadní konec X-24A tak lehký, že k němu bylo třeba přidat 140 liber (cca 63,5 kg) zátěže, aby byl kluzák vyvážen pro let.
Zdroj: Martin X-24A Lifting Body
Změn probíhalo mnoho a dá se s klidem říct, že to nebyly malé změny. Pro představu uvedu, že díky značně lehčí zadní části muselo dojít k zesílení konstrukce a to na již hotovém stroji. Tyto všechny změny vedly ke značnému zpoždění, které se stále zvyšovalo. Díky tomu musel hlavní inženýr projektu, Norm DeMar, skoro denně projednávat každý důvod zdržení s hlavním pilotem Jerauldem R. Gentrym a Paulem Biklem z FRC (NASA Flight Research Center). Paul Bikle byl ředitelem střediska NASA Flight Research Center (FRC) v Edwards. Dalším bodem zdržení se stala samotná opatrnost. Ke každému procesu se přistupovalo maximálně opatrně a pro daný projekt byla vždy ustanovena zvláštní komise složená z techniků, inženýrů. Tito odborníci ale nesměli mít nic společného s daným projektem, aby si zachovali objektivitu. Právě vyhovění všem připomínkám, občas velmi vybíravým, vedlo k dalšímu zpoždění projektu. Nutno dodat, že celá tato atmosféra kolem opatrného přístupu ke změnám měla svůj původ v nehodě vztlakového kluzáku M2-F2, která se stala rok předtím. K této události uvedu, že se jednalo o nehodu M2-F2 během přistání, která div neskončila katastrofou. Pilot Bruce Peterson byl těžce zraněn, ale později se k létání opět vrátil. Této události se budeme věnovat v některém z příštích dílů.
Kluzák X-24A byl jako první vybaven řiditelným příďovým podvozkem. Do té doby provozované kluzáky M2-F2 a HL-10 používaly pevné příďové nohy s diferenciálním brzděním hlavního podvozku. Pro tento účel byl kluzák vybaven předním podvozkem a řídicí jednotkou pro systém řízení z letounu T-39 Sabreliner. Tento systém byl ale konstruován pro pojíždění při mnohem nižší rychlosti. U X-24A se předpokládala rychlost po dosednutí okolo 370 km/h. Použití řízení „příďáku“ při takových rychlostech by vedlo k nevyhnutelné katastrofě. Proto byl celý systém řízení příďového podvozku zablokován. Samotný systém řízení příďového podvozku během pojíždění má několik bezpečnostních podmínek pro svou funkci. Pro modelovou situaci uvedu příklad. Letoun přistane na dráze a v tu chvíli prostřednictvím spínače na hlavním podvozku dojde k aktivaci jednotky řízení. Dalším krokem je snížení rychlosti pojíždění na bezpečnou úroveň. V této fázi musí být sepnut i spínač polohy na přední noze. Po snížení rychlosti na první bezpečnou úroveň dojde k odblokování jednotky řízení a může dojít k řízení příďového podvozku, ale pouze v menším rozsahu výchylek, aby nedošlo k příliš velkému vybočení, které by vedlo k nehodě. Po dalším snížení rychlosti dojde k odblokování i velkého rozsahu výchylek přední nohy a letoun tak může provádět velké změny směru. Tento systém se může lišit typ od typu, ale obecně to funguje takovýmto způsobem a proto byly úvahy o řízení příďové nohy tak důležité, protože po snížení rychlosti na přijatelné úrovně už kluzák „dojížděl“ a nemělo smysl radikálně měnit směr, navíc na dně vyschlého jezera. Doufám, že jsem čtenáři svým popisem funkce nezamotal hlavu.

Zdroj: 3.bp.blogspot.com
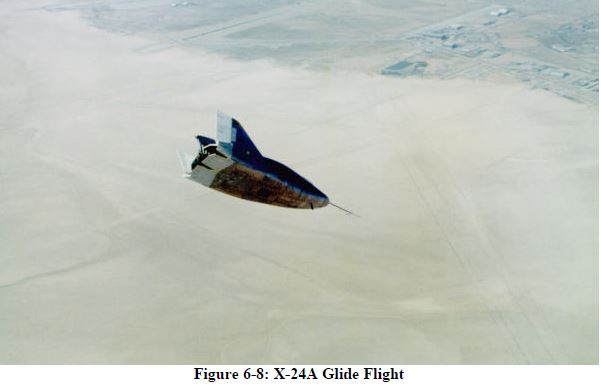
Po všech změnách v konstrukci, měřeních a cestování mezi středisky došlo na první let 17. dubna 1969, tedy dva roky poté, co byl kluzák hotov. Za řízení si usedl pilot Jerauld R. Gentry. Po oddělení od nosného letounu probíhal let v pořádku, ale netrvalo to příliš dlouho. Bohužel se objevily oscilace v podélném i příčném řízení, které znepříjemňovaly pilotáž především v nižších hodnotách úhlu náběhu a během přistání měl kluzák problémy s příčnou stabilitou. Pilot to řešil zvýšením úhlu náběhu a snížením rychlosti na přistání z původních 300 uzlů (555 km/h) na 270 uzlů (500 km/h) a během podrovnání použil nouzových raket. Po úspěšném přistání začalo vyšetřování celé události, protože přesně této události se vlastně všichni báli. Už během letů M2-F2 a HL-10 se objevily stejné problémy. Vždy se jednalo o oscilace, ale narozdíl od X-24A bylo u těchto strojů použito manuálního řízení trimování, tzn. narozdíl od automatizovaného vztahu/propojení kormidel, které mění své nastavení v závislosti na fázi letu ve vzájemné vazbě, se u manuálního řízení mohlo stát, že pilot použil páky proti správnému směru. Tím, že byl X-24A automatizovanější, tak mělo k tomuto trimování docházet automaticky na základě vstupů. Ale zhruba minutu po oddělení od NB-52 došlo k selhání řídicí jednotky. Dalším problémem byl poměr propojení kormidel, především spodních klapek a jejich účinností. Nutno dodat, že muselo být provedeno celkem devět bezmotorových, klouzavých letů, aby byl celý systém odladěn. Spodní klapky byly upraveny, aby měly vyšší rychlost obtékání. Co však byl důvod problému spodních klapek, když bylo provedeno tolik zkušebních měření v aerodynamickém tunelu? Odpovědí je podpěra zkoušeného modelu. Model byl uchycen ve spodní části trupu. Právě tato opěra významně ovlivnila proudění spodních klapek, na které se dostával turbulentní proud. Takto zkreslené výsledky pak byly použity v nastavení řízení a řídicí jednotky. Je nutno dodat, že piloti, aniž to tušili ze začátku, tak svými zásahy do řízení umocňovali tyto problémy. Navíc si musíme uvědomit, že po oddělení od nosného letounu NB-52 měl pilot zhruba 2 minuty letu na to, aby ověřil letové vlastnosti, stabilitu a manévrovatelnost s konečným přistáním. Pokud se navíc během takového letu vyskytne problém, máte velmi krátký časový úsek na řešení. Dalším důležitým bodem po prvním letu je i zpětné porovnání výsledků z měření v aerodynamických tunelech, a to i pro konfiguraci s nosným letounem.
Zdroj: Martin X-24A Lifting Body
Vzhledem ke zkušenostem z předchozích letů M2-F2 a HL-10 se USAF i NASA pustily do pečlivého šetření a koleček různých schůzek. Jedním z výsledků bylo zvýšení nácviku letů na simulátoru. Piloti strávili zhruba dvacet hodin nácviku v simulátoru pro provedení jednoho letu. Stejným systémem se řídil už program X-15. Po vyřešení všech těchto problémů a získání potřebných návyků mohlo dojít k první motorickým letům. První motorický let proběhl 19. března 1970 a za řízení opět usedl Jerauld R. Gentry.

Zdroj: Martin X-24A Lifting Body
Samotný kluzák byl poháněn osvědčeným čtyřkomorovým raketovým motorem XLR-11. Tento motor se stal pomalu neodmyslitelnou součástí vztlakových těles. Po odpoutání od NB-52 došlo klasicky k zážehu motoru a kluzák pokračoval samostatným letem pro dosažení nadzvukové rychlosti s následným sestupem a přistáním. Tím by kluzák prošel celou teoretickou trajektorii letu, kterou by absolvovalo vztlakové těleso, které by se vracelo z orbity. Je však nutné si uvědomit jeden zásadní fakt. Kluzák X-24A, potažmo celá rodina vztlakových těles, nebyla stavěna na motorický let, tedy let se stoupáním a pohonem. X-24 měl především ověřit průlet atmosférou s různými letovými profily s postupným snižováním rychlosti. Právě pro účely motorického letu muselo dojít i k úpravě konfigurace řízení, která byla odlišná od klouzavého letu. V průběhu klouzavého letu bylo dobré udržovat určitou hodnotu odporu na řídících klapkách, čímž docházelo i ke stabilizaci stroje. Během motorického letu však bylo nutné tento odpor minimalizovat po dobu chodu motoru. To vedlo k přenastavení výchylek horních klapek během transsonické a sonické rychlosti na 35°. U klouzavého letu byla tato hodnota 21°. Tuto hodnotu získali inženýři ze simulací letů, které byly procvičovány. Během motorických letů došlo ke zjištění, že i práce raketového motoru má vedlejší účinky na let samotný. Konkrétně šlo o nečekané snižování stability v podélném směru. Řešením se stalo zvětšení výchylky horních klapek z 35° na 40°. Samotný program letů probíhal bez vážných nehod a docházelo spíše k menším závadám, které neovlivnily zásadně let samotný. Motorické lety a především klouzavá část letu, byly laděny tak, aby co nejvíce napodobily návrat svého předchůdce X-23 PRIME, ale ukázalo se, že to není až tak jednoduché a přináší to nové problémy. Celkově bylo provedeno dvacet osm letů a z toho devět bezmotorově.
Závěrem uvedu, že jedním z problémů X-24A po přistání se stal samotný podvozek, který byl velmi vysoký. To vedlo k vybočování po přistání a velké citlivosti na diferenciální brzdění, zároveň byl stroj citlivý i na boční vítr v této fázi. Kluzák X-24A tím ale svou službu zdaleka neskončil a na obzoru už se rýsoval nový nástupce, který vzejde ze svého předchůdce. Pro zajímavost uvedu, že dnes vystavený exemplář X-24A je vlastně SV-5J, což byla verze s proudovým pohonem, která nebyla uvedena do provozu.

Zdroj: The Lifting Body Story
Závěrem o X-24A si opět dovolím přidat dvě zajímavá videa k tématu.
[youtube https://www.youtube.com/watch?v=Y9-6gQHwD90?si=1yHuCeuPvgAQNdGi]
[youtube https://www.youtube.com/watch?v=pIna_2XJMw0?si=ajA6MFyeu2RyQoMY]
Zdroje informací:
Design Evolution and AHP-based Historiography of Lifting Reentry Vehicle Space Programs, Autoři Loveneesh Rana a Bernd Chudoba, Rok vydání 2016
Wingless Flight, The Lifting Body Story, Autor R. Dale Reed, Rok vydání 1997
Testing Lifting Bodies at Edwards, Autor Robert G. Hoey, Rok vydání 1977
Martin X-24A Lifting Body, Autor Miles Miller, Rok vydání 2012
Zdroje obrázků:
ninfinger.org/models/
media.defense.gov/
3.bp.blogspot.com/
Martin X-24A Lifting Body, strana 53
Martin X-24A Lifting Body, strana 90
Martin X-24A Lifting Body, strana 88
Testing Lifting Bodies at Edwards, strana 87
Testing Lifting Bodies at Edwards, strana 90

{kind=link}
{kind=link}
{kind=link}
Super! Děkuju za prima sváteční čtení.
Dobrý sváteční den.
Mockrát děkuji za slova chvály. ☺️
dechberouci prehled toho co jsme v zakrytu Apolla nevideli
dekuji
Dobrý večer,
A to byla vlastně cesta k raketoplánu. Výsledky těchto projektů vlastně využívaly i programy před Apollem
Jen doplnim jeden detail k nehode M2-F2, ktery mi ted po 30+ letech konecne sepnul… jako teenager jsem sledoval hned na zacatku 90. let na satelitni televizi serial “The 6 Million Dollar Man”, ktery zacinal osklive vypadajicim padem divneho letadla (coz donutilo US vladu udelat z tezce zraneneho pilota polovicniho cyborga…pri nakladadech pouhopouhych…ano hadate spravne 6M USD)…a on to byl realny pad M2-F2, kdy bohuzel pilot skutecne skoncil tezce zraneny a prisel i o oko. Vice viz: https://airandspace.si.edu/stories/editorial/crash-made-famous-tv
Ano, přesně jak píšete. Jediny kdo z toho postupem času neměl už radost byl Bruce Peterson, které mu tak říkali všude. Stejně tak ve filmu Správná posádka je záběr, kdy se Chuck Yeager vystřelí s NF-104, pak následuje ukázka jak padá a kouří se mu z helmy. Byl to parašutista, který měl v té chvíli vážně problémy a nakonec při tom pádu zemřel. Ve filmu to zůstalo